P2 Exercise 1 - Introduction¶
Note
Practice 2 is optional. You don’t have to do it if you don’t feel like it. But its way more challenging and hence fun
In this practice we are going to turn the difficulty up a notch and switch the simulation environment and the programming language. The simulation itself is based on Webots simulator that is hosted on robotbenchmark.net (see figure 1). The programming is done via Python programming language. Robotbenchmark has created a list of challenges, where the fist two (“Viewpoint Control” and “Robot Programming”) just introduce the environment. So let’s have a look.
Before we dive right in, make sure that your web browser is compatible with this simulator. Have a look at this link and check the “Browser Compatibility” section. Next head to robotbenchmark.net. You will see a list of challenges. Go through the “Viewpoint Control” and “Robot Programming”, these introduce you the environment and how to program the robot’s controller.
It might take some time to load the simulation and depending on your hardware, it might not be the smoothest. After the sim is loaded you will see an instructions window in the upper left corner of your screen. Don’t ignore them, as these explain the rules of the challenge and provide some good tips. For example there is a console window, where your controller can print out debugging messages which might provide hepful insight on why yor controller is or is not working.
Warning
For your information, the performance of the simulator will degrade significantly if you print too frequently (for example every controller cycle) in the console
If you want to record your results, then you have to create an account and log in, quite straight forward.
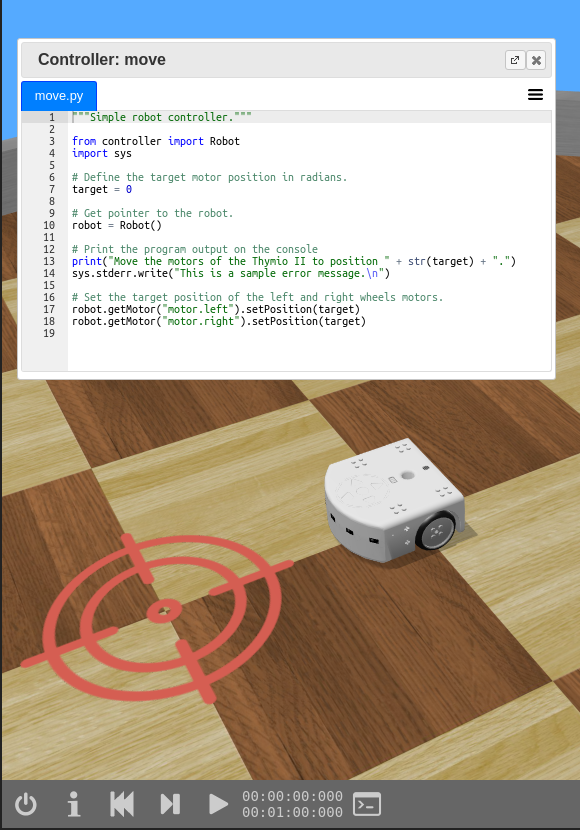
Figure. 1: Webots simulator hosted on Robotbenchmark